はじめに
特に「バーニア」について、実際のロケットや宇宙機の画像、動画を交えて説明してみます。
最初に「姿勢制御」について書いていきます。打上げ用ロケットと宇宙機で違った使われ方(といっていいと思いますが)をしているので、ややこしくなっています。
姿勢制御
ガンダム界隈で「姿勢制御バーニア」という単語を目にします。「バーニア」はひとまずおいとくとして、「姿勢制御」とは何でしょうか。
ガンダムなどの姿勢制御
ガンダム世界で「姿勢制御」がどういう意味で使われているか。サンライズやバンダイあたりで用語集があればいいのですが分からなかったので、手持ちの紙の資料(ロマンアルバムとセンチネルしかない[1])から調べてみると――。
機体の向きを変えたり、回転したり、移動、微かな移動、制御するのに用いられる。
この辺が「姿勢制御」の印象でしょうか。ガンプラを手にしていろんな方向にぐるぐると回してみる感じといいますか。
なぜ機体の向きを変えたり回転するのか、というと主に戦闘(シーン)のためでしょうか。ガンダムは近接戦闘を行う兵器(として演出されている)だったと思いますし。
この動画のように、宇宙を舞台にしたドッグファイト(戦闘機対戦闘機)や殺陣(ヒト対ヒト)を模した演出として、噴射炎を交えながら機体の姿勢をぐるぐる変えたり(回転運動)上下左右前進後退と機体の位置を変える(並進運動)のを機敏に行う――というのが「姿勢制御」だ、とファンの方は捉えているんじゃないかな、と思っています。もしかしたら作り手側の方々も。
姿勢制御の方法として語られる「AMBAC」の解説をいろいろ読んでみても、大体こんな感じだろうと。
打ち上げロケットの姿勢制御
例えば自動車を運転するとして。目的地にいくまでに右や左に曲がることがあると思います。
まっすぐな道を走るときも、道路の状態や風、直進性の問題などで、若干左右に振ることもあると思います。
ロケットはどうでしょう。最初は上へ上がりますが、次第に地球の丸みに沿うよう水平になっていきます。また、風の具合やロケットエンジンの調子などで、進行方向が乱れることもあります。ロケットも進行方向を変える必要があります。
- 目標のコースをたどるよう姿勢を変更する:いわゆる舵取り
- 外乱などで姿勢が乱れても安定させる
もう少し詳しく
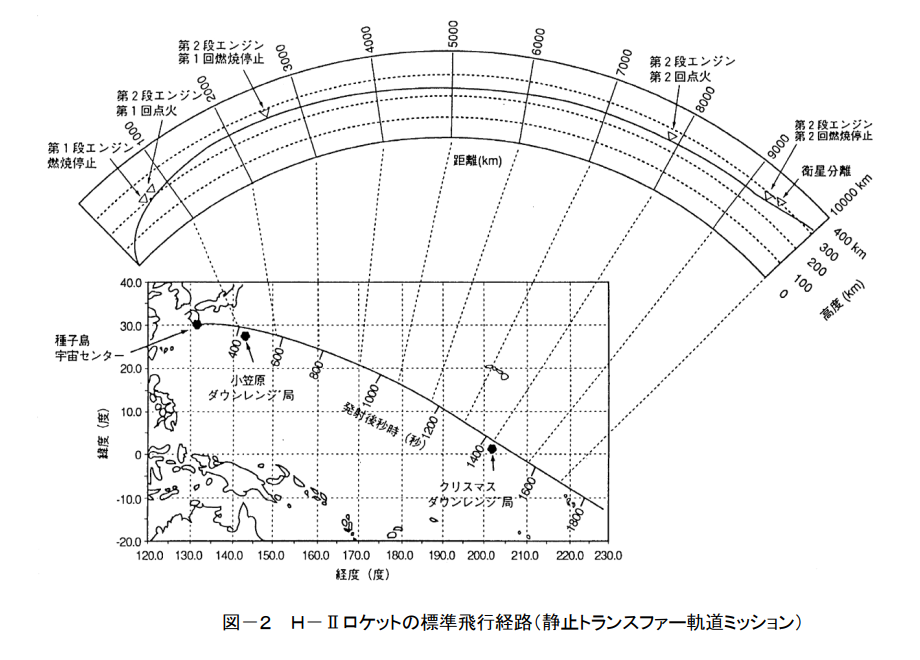
図は、H-IIロケットが静止衛星を打ち上げるときの標準的な飛行経路です。H-IIは1994年から1999年まで使われた日本の打上げ用ロケットです。
上のグラフは高度と距離の変化を表しています。縦軸が誇張されており、実際にはもっと平坦な感じになります。
打上げ用ロケットは、最初は空気抵抗のない宇宙に早めに出るため上昇し、徐々に進行方向を変えて地上と平行に進み、目標の高度をぐるぐる回れる速度(地球を離れるなら離れられるような速度)にまで加速します。
下の地図は上から見たときの経路です。種子島から真東に打ち上げています。南東へコースを変えているのではと思われた方は、「軌道制御とアポジモーター」の東か南東かを読んでみてください。
打ち上げでは、大気の状態やエンジンの調子、エンジンが複数の場合は動作のばらつきなど、姿勢を不安定にする力が働きます。姿勢が乱れると進行方向がズレます。余計な力がかかったら、姿勢を制御して進行方向を修整しないといけません。
スペースシャトルは、1981年~2011年まで使用された米国の再利用型宇宙船です。
離昇直後は真上に上がりますが、その後ゆっくりと右へ回転(ロール)しながら少し傾いた状態(ピッチ角変更)で飛んでいきます。斜めに上昇するときは搭乗者の頭が下になる姿勢になります[2]。
姿勢を制御することで進行方向を調整しています。
話はそれますが、燃料の違いによる噴射炎の色の違いが分かりますね。飛行機みたいなオービターについている3基のメインエンジンの噴射炎は、液体水素+液体酸素で高温の水蒸気が出る反応なので無色透明です。両脇の固体ロケットブースターの燃料はアルミ粉末や酸化鉄などが入っているので、色つきの炎が出ています。日本のH-IIAや2022年11月16日に月を目指して打ち上げられた米国のSLSも同じ構成です。
いにしえのサターンⅤロケット1段目やロシアのソユーズロケットは、液体水素では無くケロシン(灯油の主成分)と液体酸素を使っています。ケロシンは炭素を含んでいるので色つきの炎が出ます。
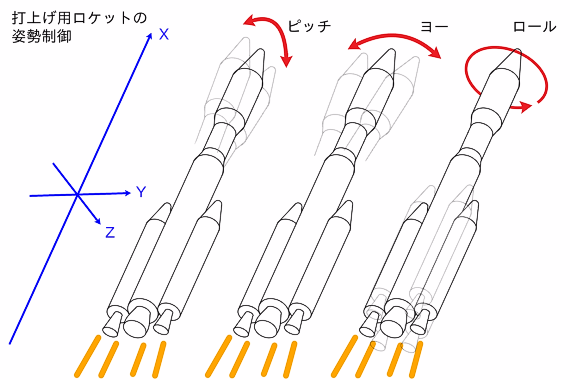
うまく目標の軌道に乗るためには、ロケットの3軸(X、Y、Z)周りの回転(ロール、ピッチ、ヨー)を制御し、ロケットの姿勢を制御して方向を調整します。
つまりロケットの姿勢制御とはロケットの操縦を意味しています。ガンダムなどで使う姿勢制御とは意味合いが異なるかもしれません。
宇宙機の姿勢制御
宇宙機は宇宙に出てからが仕事です。
地球など天体の周りをぐるぐる回っています。基本的に進行方向は常に同じです。
仕事をこなすには姿勢の向きを制御することが大切です。太陽電池を太陽に向けたり、探査装置を目標に向けたりなど。この辺はガンダムなどで使う姿勢制御と意味合いが似ているかもしれません。
もう少し詳しく
人工衛星
人工衛星は地球の周りをぐるぐる回っています。多くは太陽電池で作る電力で活動するので、太陽電池に太陽光が当たらないといけません。地上と通信するためのアンテナや、(地上や宇宙を)観測する機器を指定の方向にきちんと向けることも大切です。
人工衛星にはいろいろな力がかかっています。地球の近くだとわずかな空気抵抗があるので姿勢が乱れるし、他にも姿勢を乱す様々な[3]要因があります。
人工衛星が活動できるようにすること、外乱に対応すること、これらは姿勢を制御してやることが必要です。
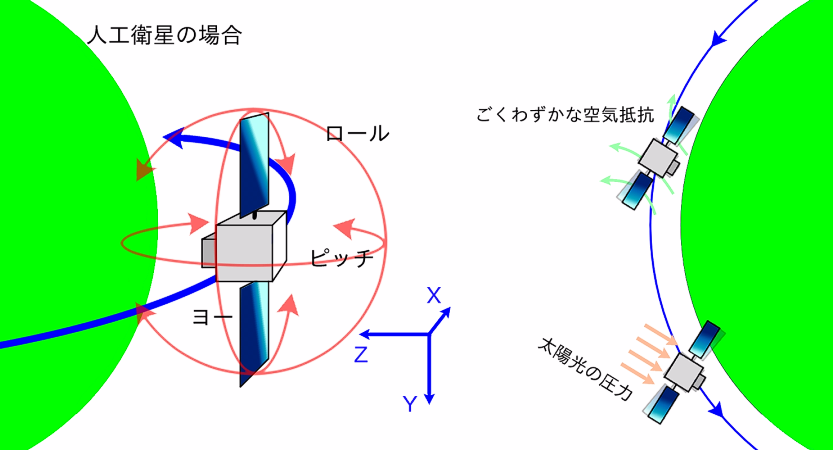
ロケットと同じく人工衛星にも三つの軸があります。例として軌道周回方向のX軸、観測方向のZ軸、それらと直交するY軸。それら軸周りの回転を制御することで姿勢を制御します。
探査機
探査機は地球の周回軌道から抜け、月や惑星に行って探査活動を行います。天体の周回軌道に乗ったり、地表に着陸したり、様々な活動を行います。太陽の重力を振り切って太陽系外へ向かう探査機も今のところ5機あります。
これらにも三つの軸があり、制御することでアンテナが地球に向くようにしたり探査機器が天体を向くようにしたりしています。
有人宇宙船
有人宇宙船のスペースシャトル・オービター(以下、オービター)には巨大な貨物室があり、多彩な仕事をこなしました。
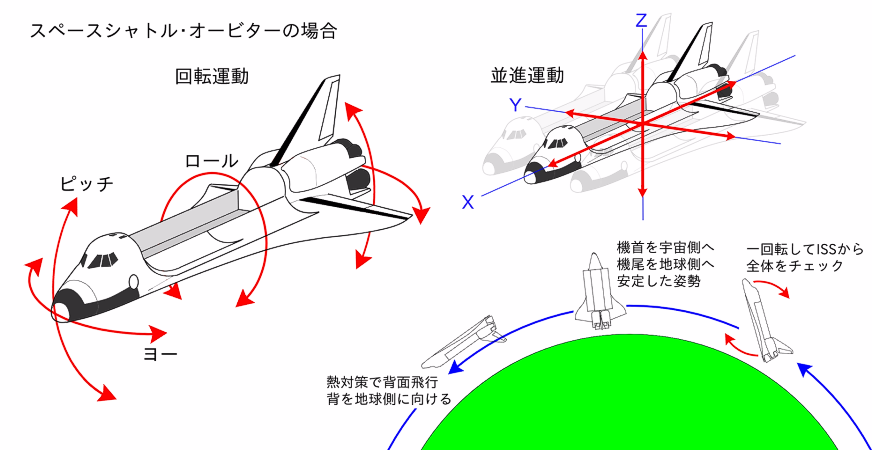
オービターは機体を自在に動かして仕事をこなすため、三つの軸を中心にした回転運動(ローテーション)、三つの軸に沿った並進運動(トランスレーション)を行います。
機体がどちらを向いていても、地球を回る方向は変わりません。進行方向に対して横を向こうが後ろを向こうが、機体はひたすら同じ方向へ進みます。
宇宙機も進行方向を変えるが
地球を離れて遠くに行く探査機や、地球の周りを回った後帰還する有人宇宙船は、打上げ用ロケットのように進む方向を変えることがあります。基本的に地球の周りを回るだけの人工衛星も、打上げ用ロケットから切り離されてから目的の軌道に乗るまでの間に進む方向を変えるものもあります。
それらは軌道制御と言われ、姿勢制御とは区別して語られます。
バーニアについて
アニメのメカものでよく使われる「バーニア」ですが、現実のだと「打上げ用ロケットのバーニア」と「宇宙機のバーニア」の2種類あると思った方がいいと思います。
- 打上げ用ロケットのバーニア
- ロケットの進行方向を変える(ロケットの姿勢を制御することで向きを変える)
- 宇宙機のバーニア
- 宇宙機の姿勢を変えるRCSのうち微調整用のスラスター(進行方向はほとんど影響はない)
- スペースシャトル・オービター以外では知らない
以降は、打ち上げロケットの姿勢制御と、宇宙機の姿勢制御を順に解説します。その中に「バーニア」が出てきます。ややこしいですがご注意ください。
打ち上げロケットの姿勢制御
自動車が進行方向を変えるには前輪の向きを変えます。曲がりたい方に前輪を向ければその方向に走ります。
ロケットは姿勢を制御して方向を変えていきます。具体的にどうやっているのでしょう。
様々な方法
ロケットの姿勢を制御して方向を変える方法はいくつかあります。上図はそのうちの4つです。
- Movable Fins(空気翼法)
- Gimbaled Thrust(首ふりエンジン法)
- Vernier Rocket(副エンジン法)
- Thrust Vane(噴流翼法)
括弧内はJAXAロケットガイドブックの用語ですが、英語読みのジンバル、バーニアロケット、スラストベーンの方が馴染みかもしれません。
左右両端の2つは昔のロケットや空対空ミサイルなどに使われています。現在の打上げ用ロケットのような大型のロケットでは間の2つ、ジンバル制御とバーニアロケットによる制御が使われています。
ジンバル制御
エンジン先端に付くジンバル機構でロケットエンジンを動かし、推力の方向を変える方法です。
エンジン機構のない固体ロケットの場合はノズルを傾けます。
もう少し詳しく
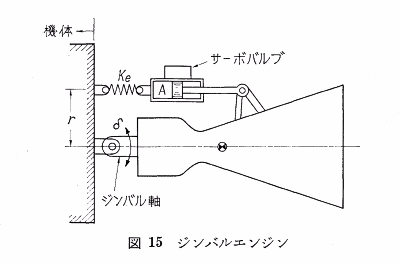
上図では機体とエンジンをつなぐジンバル点に軸が1本なので、図の向きだと上下方向(ピッチ方向)にエンジンが可動できます。直交するもう1本の軸とアクチュエータ(図だとシリンダ、ピストン、サーボバルブなどからなる装置)があればピッチとヨー方向の制御ができるようになります。
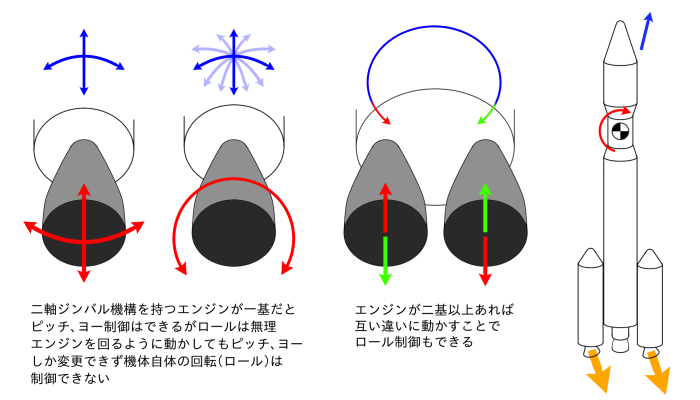
エンジンが1基だと、ピッチ制御とヨー制御ができますが、ロール制御は無理です。
エンジンが2基以上だと、互いに逆方向に向けることでロール制御もできます。
スペースシャトルは、1981年~2011年まで使用された米国の再利用型宇宙船です。
エンジンが動く様子を見られるのは、打ち上げ3分半前のジンバル機構のテストと、3秒前に噴射炎を出しているノズルが少し内側を向くあたり(発射位置に移動)です。
これらの方法は、米国や日本のロケットでよく使われています。
バーニアロケット
主にロール軸周りの制御
ロケットの進行方向を制御するために使われる小型のロケットです。ロケット本体の姿勢を変えることで進行方向を変えます。
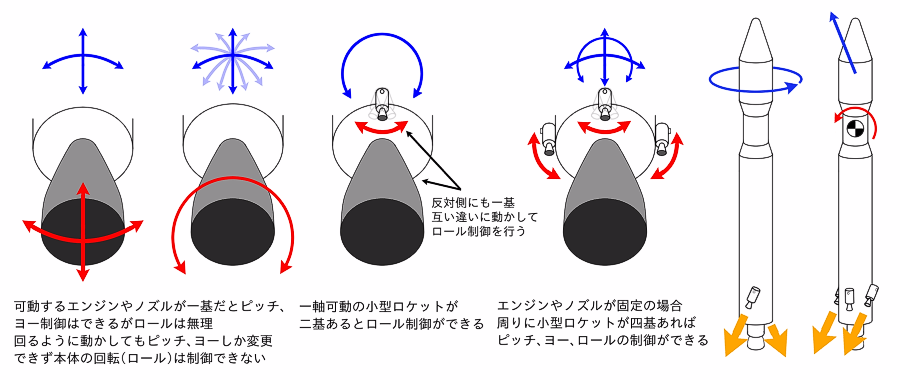
米国や日本のロケットではエンジンやノズルを動かしていますが、エンジンが1基だとロール軸周りの制御ができません。その場合、小型のロケットエンジンを本体周りに一対取り付けて動かすことでロール軸周りの制御を行ったりします。

アトラスDロケットは1960年代前半に打ち上げられた米国のロケットです。一番下には3基のエンジンがあり、中央の1基はロケット本体に付いていて、両脇は分離できるブースターエンジンです。3基ともジンバル機構を備えています。
これらのエンジンよりやや上の両脇に2基のバーニアエンジンがあります。離昇直前から最後まで動作します。
ブースターエンジン2基は分離投棄するので、途中からは本体に付いているエンジン1基で上昇します。エンジン1基ではロール制御ができないので、バーニアエンジンがロール制御を引き受けます。

ロケット本体の両脇に付いているバーニアエンジンから、斜めに噴射炎が出ているのが分かると思います。
バーニアエンジンが点火して細い噴射炎が見えます。離昇直後、バーニアエンジンの噴射炎が一瞬右に振れています[5]。
離昇時のピッチ、ヨー、ロール(3軸)制御は2基のブースターエンジンが行い、バーニアエンジンはロール制御の補助を行います。ブースターエンジン投棄後は中央のエンジンがピッチとヨーの制御を行い、バーニアエンジンはロール制御を担当します。中央のエンジンが燃焼を停止したあとは、バーニアエンジンが3軸すべての制御を行いました。
三軸周りの制御

ソユーズロケットは1966年より改良を続けて使われているソ連/ロシアのロケットで、3段式[5]の液体ロケットです。ソユーズUやソユーズFGなど、いくつかの種類があります。
中央のロケット本体の周りに、4本のブースターが付けられています。それぞれに大きなノズルが4個ずつあり、中央には小さなノズルが4個、周りのブースターには2個付いています。
この小さなノズルがバーニアスラスターのノズルです。制御エンジンと訳されている本もあれば、ロシア語の資料ではステアリングユニット(操舵装置)と書かれていたりします。
大きなノズルは固定されていて動きません。代わりに一軸を中心に首振り運動をするバーニアスラスターがピッチ、ヨー、ロールの制御を行います。
NASAによるソユーズロケットの「バーニアスラスター」表記は、プレスキットのページのExpedition 27/28 Press Kit 32ページ、The vernier thrusters provide three-axis flight control.
などに見られます。
バーニアによる打ち上げ用ロケットの制御は、とくに米国(NASA)ではあまり使われなくなりました。燃料と配管の重量が増えるため[6]、とのことです。よく使われるのはジンバルによる制御です。
日本の場合、宇宙科学研究所のロケットでは、M-3Sから、ロール制御を行う小型の固体ロケットモーター SMRC(Solid Motor for Roll Control)[7]が尾翼の先端に付けられ使われた例があります。バーニアモーターとは呼びません。
旧宇宙開発事業団のロケットでは、Qロケット(米国のロケット技術導入決定で開発中止)、N-I、N-II、H-I(いずれも米国デルタロケットの技術導入)、J-Iにロール制御を行うバーニアエンジンが使われています。1970年から1992年にかけての話です。
J-Iは小型の固体ロケットブースターのような感じで付けられ、外部バーニアエンジンと呼ばれました。
1994年~1999年に使われたH-IIロケット、2001年から現在も使われているH-IIAロケットには補助エンジン(英訳はAuxiliary engine)というのが1段目の下部に付いており、固体ロケットブースターが分離したあとのロール軸周りの制御を行います。バーニアエンジンという表記ではないですが。
宇宙機の姿勢制御
宇宙機の姿勢制御のうち、まずはロケットエンジンを使うものを書いていきます。
ロケットエンジンを使わずに姿勢を変える方法は下の方に書きます。ガンダムだとAMBACに相当する方法という感じでしょうか。
RCS
Reaction Control System の略語で、姿勢制御システムと訳されます。直訳すると反動制御系でしょうか。他にも反作用制御装置、機位変更システム等の訳があります。姿勢制御に用いられる小さな推力のロケットです。
宇宙機のRCS

「こうのとり(HTV)」は日本の宇宙ステーション補給機です。1~9号機まで作られ、すべて成功しています。
軌道変更用のメインエンジンが4基、姿勢制御用のRCSスラスタが28基付いています。
1、2、4号機のスラスタは米国の輸入品を使っていました(4号機は予備として残っていたものを使用)。RCSスラスタはスペースシャトル・オービターのバーニアスラスターとして使われた、エアロジェット社(当時)のR-1Eエンジンを使っていました。3号機と5号機以降は国産になっています。
メインエンジンという名称ですが、1号機と2号機のプレスキットには「メインスラスタ」とありましたが、3号機以降は「メインエンジン」表記になっていました。ただ英字では「Main Thruster」となっています。
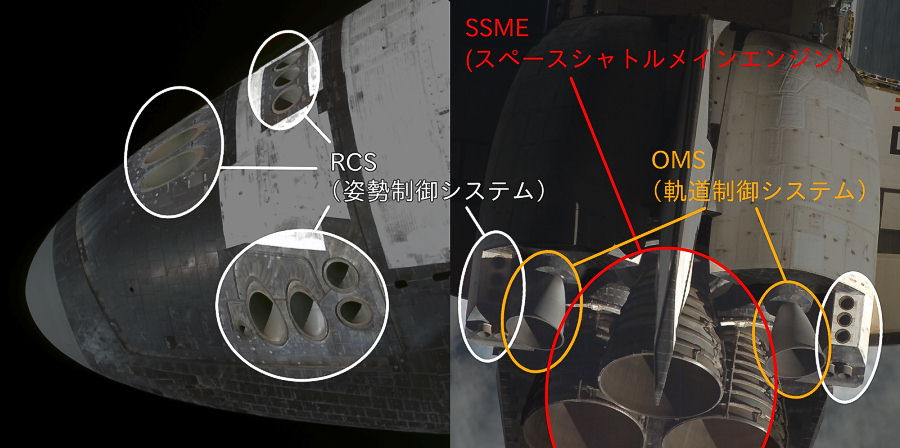
スペースシャトルの機首と機体後部左右にもあります。太陽の熱を均等に受けるために機体を時々回転したり、国際宇宙ステーションとのドッキングのために機体の向きを変えたり等、姿勢を制御するのに使われます。軌道を上昇させたり離脱させたりなど、もう少し大きな力が必要なときは、機尾に2基あるOMSエンジンを使います。メインエンジンは外部燃料タンクから燃料を得ているので、タンクが無ければ動きません。

金星探査機「あかつき」は2010年に打ち上げられた日本の探査機です。
金星を回る軌道に入るときに使う軌道制御エンジン(OME)が1基。姿勢制御や軌道の微調整用のRCSは、推力が違う2種類があり、大きめのが角に8基、小さいのがOMEが付いている面の角に4基あります。それぞれ推力は一桁ずつ違います[7]。
あかつきはOMEの故障により十分な減速ができず金星周回軌道に乗れませんでした。5年後に再び金星に接近したときに、RCSを20分強の長時間連続噴射することで金星を回る軌道に乗ることができ、探査を続けています。
RCS長時間連続噴射による軌道制御というと、スペースシャトル帰還時の減速があるでしょうか。普通は大きめのエンジン(軌道制御システム)2基で行いますが、2基とも故障したときはRCSを代わりに使います。OMSの3倍半の時間がかかりますが、減速は問題なく行えるとのことでした。
フィクションでは小説『火星の人』のラスト近くがあるでしょうか。主人公が火星を脱出したものの速度が出せず、地球ー火星間宇宙船「ヘルメス」の近くにいけないことが分かります。メインエンジンのイオン推進だと推力が小さく時間内の接近は不可能なので、RCSを使って接近します。映画は未見なのでこの辺が映像化されているのか改変されているのかは知らないのですが。
航空機のRCS
航空機は翼の一部が折れ曲がったり立ち上がったりして(動翼)姿勢を変更し、進行方向を変えます。
空気が非常に薄くて動翼による操縦ができないほどの高空まで上がる場合、RCSで姿勢を変更します。

米空軍の実験機X-15です。3機作られて1959年から1968年まで飛行を行い、高度では107km強、速度ではマッハ6.7を記録しました。
機首の上下左右と主翼の上下にRCSスラスターがあり、成層圏上部での姿勢制御を行いました。メインエンジンはアンモニアと液体酸素を使う液体ロケットエンジンが1基です。
米空軍のテストパイロット学校で使われた訓練機NF-104Aです。3機作られて1963年から1971年まで使われました。元になる戦闘機F-104から武装を外し、垂直尾翼基部に液体ロケットエンジンを追加しています。RCSはX-15と同じく機首の上下左右、主翼上下に付いていました。
動画ではRCSスラスターの噴射の様子が映っていますが、白い筋が後ろにたなびいていて姿勢は変わっているように見えません。後ろにたなびくほどの影響がある大気ではRCSの効果もなかったのかな? 関係ないですが開始6秒ほどの後ろの方に写る垂直尾翼2枚の白く大きな機体はXB-70バルキリーでしょうか。
映画「ライトスタッフ」にも出てきたチャック・イェーガーの墜落の動画がエドワーズ空軍基地提供でYouTubeにありますが、開始45秒から主翼と機首のRCSが写っています。
| 種類 | 推力(ニュートン) | 推力(キログラム重) |
|---|---|---|
| HBT-1(こうのとり) | 124N | 12.7kgf |
| プライマリスラスター(スペースシャトル・オービター) | 3870N | 395 kgf |
| バーニアスラスター(スペースシャトル・オービター) | 110N | 11 kgf |
| 23N級スラスター(あかつき) | 23N | 2.3kgf |
| 3N級スラスター(あかつき) | 3N | 0.3kgf |
| ピッチ・ヨー用機首RCSスラスター(X-15) | 445N | 45 kgf |
| ロール用翼端RCSスラスター(X-15) | 178N | 18 kgf |
| ピッチ・ヨー用機首RCSスラスター(NF-104A) | 500N | 51 kgf |
| ロール用翼端RCSスラスター(NF-104A) | 190N | 19.5kgf |
| HBT-5(こうのとりメインエンジン:以下、推力の参考) | 478N | 48.7kgf |
宇宙機のバーニア
微調整用(スペースシャトル・オービター)
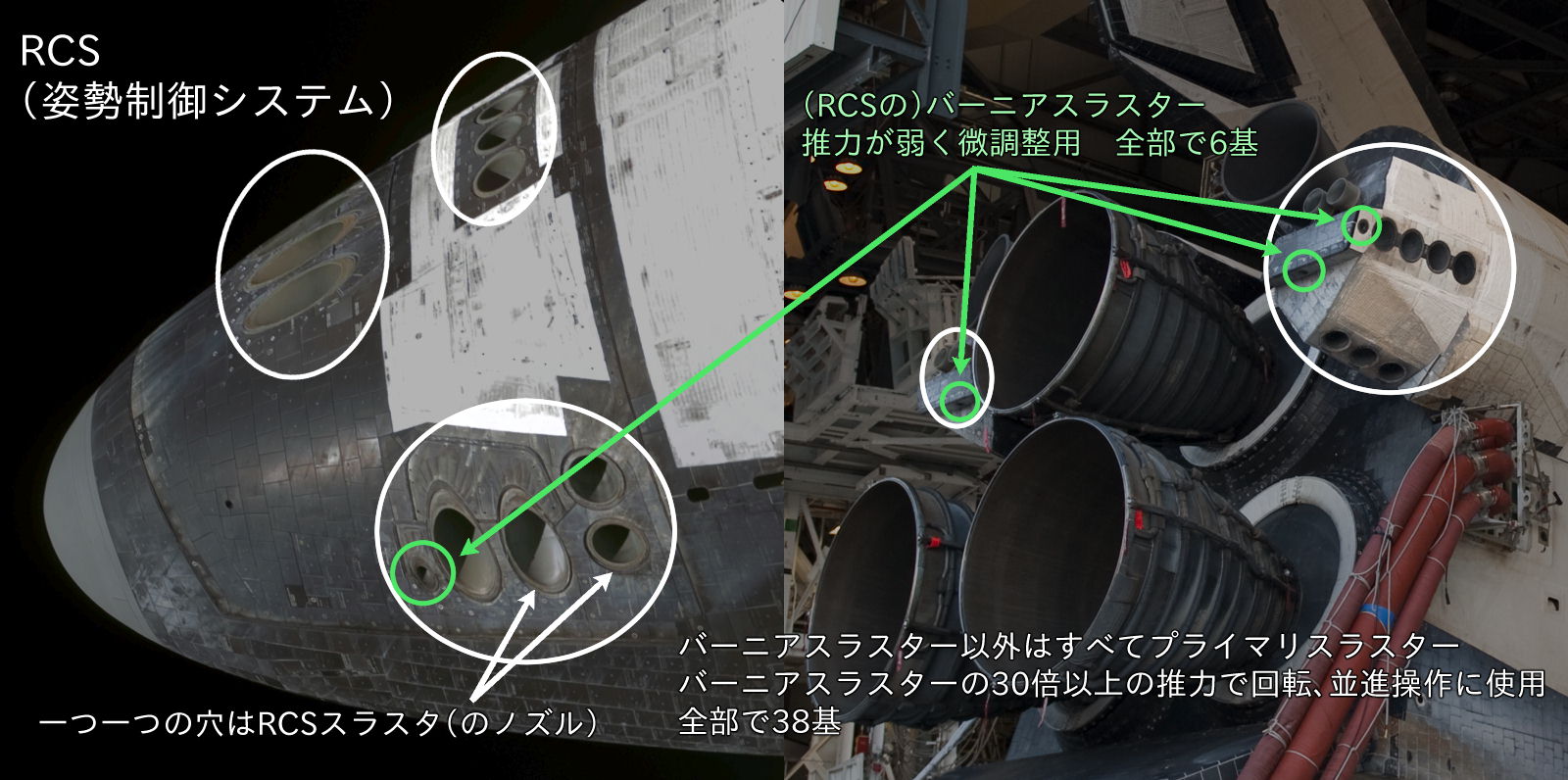
少し上でスペースシャトルのRCSの画像を貼りました。スペースシャトルのRCSは推力が違う2種類があり、使い分けられています。
- プライマリスラスター
- 回転、並進操作に使用。
- バーニアスラスター
- 推力が弱く、微調整用。国際宇宙ステーションの高度変更にも使われた。
「バーニア」の解説で「微調整」と説明されるのは、たぶんこのバーニアスラスターのことだと思います。
人工衛星や探査機では、推力が違う2種類のRCSスラスタを積むことがあります。しかし、それらの小さい方をバーニアスラスターと呼ぶ資料は知らないのでした。資料では推力の数値(20Nとか5Nとか)で書き分けているように思いました。
打上げ用ロケットの逆(サーベイヤー1号)
探査機に付いていたバーニアエンジンの例です。こちらはスペースシャトルのような微調整という意味より、打上げ用ロケットに使う「進行方向を制御する」意味合いの方だと思います。
打上げ用ロケットで、ロールや3軸の制御を行うバーニアエンジン(バーニアスラスター)は上昇する方でしたが、こちらは下降する方です。
1966年~1968年にかけて、米国で「サーベイヤー」という月面探査機が1号から7号まで打ち上げられました。月面に降下する際使われたのは逆噴射用固体ロケット1基で、下降途中の修正や姿勢制御に3基のバーニアエンジンを使いました。

概略図には「VERNIER ENGINE」と「RETRO ROCKET MOTOR(逆噴射ロケットモーター)」の文字が見えます。右中にも VERNIER の文字がありますが、バーニアエンジンの燃料タンク内を加圧してエンジンに送り込むためのヘリウムガスを貯めているタンクみたいです、多分。
バーニアのまとめ
- 打ち上げ用ロケットの場合
- ロケットが目標の軌道に入れるよう、本体の向きを調整する小型のロケットエンジン。舵取りの役目を行う。
- 宇宙機の場合
- スペースシャトル・オービターの場合、RCSのうち微調整用の小推力のスラスター。
バーニアには補助や微調整という意味がある……からといって、(特にロケット関係では)補助や微調整に使うものならなんでも「バーニア」と呼ぶわけではないようです。補助や微調整という意味で覚えるより、実際にその名が付く機器を知っていく方が誤解や思い込みが少なくてすむのではないか、と思います。
バーニアは、「ノズル」「ロケットエンジン」などに使われる、便利なメカもの創作用語になっているな、という気がします。と言うか、炎が出て機体を回したり進んだりする箇所をどう言うか迷ったとき、とりあえず「バーニア」と言っとけば大体OK、補助とか微調整とかも関係なし、みたいになっているのではないかと。
メカもの創作用語だけならともかく(これも広がりすぎてて良くないと思っていますが)、現実の航空宇宙関係や軍事関係にまで広がっているのはマズいと思っています。軍事関係で使われるとすれば、北朝鮮の長距離ミサイルなど一部のミサイルの話題で出てくる程度ではないかなと。
姿勢制御の他の方法
宇宙機で使われる姿勢制御のうち、スラスター以外の方法を少し書いておきます。
弾み車を使って姿勢を制御する
回転するホイールは、抵抗がないといつまでもその回転を続けようとします。速度だけではなく傾きも維持しようとします。回転速度が変わったり、回転軸が動いたりすると、それらの動きと逆方向の力が働きます。地上で同じことを――例えばホイールなどの機構を手に持って行うと、自身は床や地面に立って動かないので抵抗として感じますが、床や地面のない宇宙空間の軌道を進む宇宙機などではその力が姿勢を変更する力として働きます。
2種類の装置が使われています。どちらも宇宙機の3軸を制御するのには複数必要です。
- リアクションホイール(RW)
- 回転数を変えることで生じるトルクを姿勢変更に使う
- 人工衛星や探査機に搭載
- と略される装置
- コントロール・モーメント・ジャイロ(CMG)
- 回転軸の向きを変えることで生じるトルクを姿勢変更に使う
- 宇宙ステーションなど大型の宇宙機に搭載・小型化されたものが人工衛星などに搭載されたりしている
RWは工学技術実証機「はやぶさ」でよく聞いたのではと思います。3基中2基が壊れたので、はやぶさ2では4基に増やしました。
CMGは国際宇宙ステーションの他、米国のスカイラブやソ連/ロシアのミールといった大型のものに積まれていました。リアクションホイールより数十倍も強いトルクを生み出せます。
両方とも電力だけで動くので、太陽電池が生きていればずっと動かすことができます。ただし回転軸の軸受けなどが壊れやすいようです。他にも複数のCMGを使う場合、制御できない方向ができる(CMGの特異点)ので、影響が少なくなる設計や運用が必要になります。
動作の原理についてはJAXAの動画がわかりやすいと思います。
10分30秒からはRWの解説があります。1分20秒からと9分53秒あたりから始まる、回転する車輪を傾ける実験はCMGに当てはまりますね。できれば最初から視聴してみてください。
わかりにくければ、ガンダムで言うところの「AMBAC」の回転運動版……、と言ってしまっていいのだろうか。あくまでもそういう雰囲気というかそれっぽい感じ、という緩い認識でいてくださればと思うのでした。
ジャイロ効果については、ガンダム関係だと「スペースコロニーは二基で一組」という話が知名度高そうでいいかもと思いましたが……、知名度高いだろうか。
コマのように回転する
スピン安定方式と呼ばれ、全体をコマのように回転させて姿勢を安定させる方法です。
本体が回転しているので太陽電池や観測機器の配置に制約が多いです。地球に向けるアンテナなど本体の一部は逆回転させて、常に一定の方向を向くようにしたりしています。
初期の人工衛星によく使われたようです。先に挙げたホイールを使う方法は、回転するものを本体自身から内部に移し、機能的な自由度を高めています。
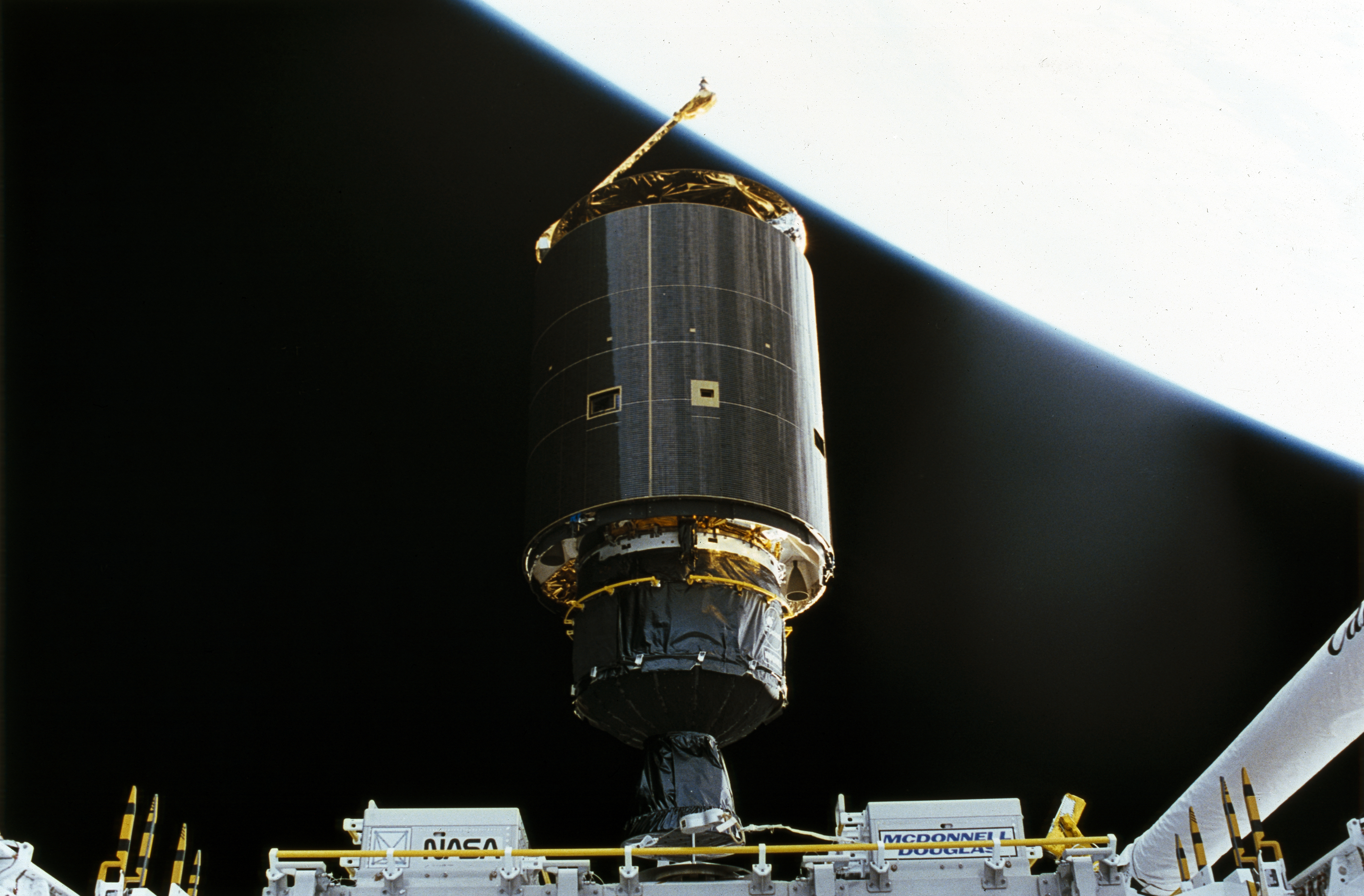
インテルサット603は元々1990年に打ち上げられた米国の通信衛星です。本体は円筒形で、1分間に30回転し、姿勢を安定させます。アンテナなどの通信機器は本体と逆回転することで地球上の目的の箇所を指すようになっています。
静止軌道に行くはずが失敗して地球低軌道にとどまり、1992年にスペースシャトル・エンデバーに回収されてロケットモーターを取り付け、無事に静止軌道に乗ることができました。
初期の気象衛星ひまわり(初代~5号機、1977年~2005年)もスピン安定式で、100rpm(1分間に100回転)でした。
文書更新履歴
- 2022年12月05日
- 説明の順番変更。
- 打ち上げロケットの姿勢制御で画像に「rktcontrl_nasa.gif」追加。
- 2022年11月19日
- 「打ち上げロケットの姿勢制御」に噴射炎の色について追加。
- 宇宙機の姿勢制御画像2枚変更。
- 2022年11月17日
- バーニアエンジン画像に「Mercury Project」追加。
- 2022年11月16日
- このページを初公開。