はじめに
「アポジモーター」について、実際のロケットや宇宙機の画像を交えて説明してみます。
「アポジモーター」をよく知るには軌道制御を知っておいた方がいいと思うので、その辺から書いていきます。
軌道制御
ガンダムと関係の無い話が続きます。よく分からなくてもざっと読んでおいてください。数値とかは気にしなくてもいいです。
ガンダムなどの軌道制御
ガンダム界隈で「軌道制御」という単語は、姿勢制御ほどには聞いてないかもと思い少し検索してみましたが、やはり少ない感じでした。そもそも「軌道」自体そんなに聞かなさそうかも。
「軌道」が付く単語で聞くのは「ハロー軌道」でしょうか。舞台として登場するスペースコロニーは、地球ー月系のラグランジュ点1~5を中心とするハロー軌道上にあるという設定のようで、その辺の話で出てくるようです。予備知識の軌道でも少し書きましたが、昭和の頃はハロー軌道って聞いたことがなかったと思うのでどこかの時点で設定に加わったんだろうと思うのですが。
宇宙機の軌道制御
軌道というのは予備知識で書いたとおり、宇宙機がたどる道筋のことです。
宇宙機は様々な理由で軌道を変えることがあります。
- 別の軌道に行く
- 地球に近い軌道から遠い軌道に移る(もしくは逆)
- 対象とランデブーやドッキングするため軌道を変える
- 大気圏に再突入する軌道に変える(有人宇宙船なら帰還のため、宇宙ステーション補給機なら主に焼却のため)
- 軌道を修正する
- 外乱で軌道がずれたので修正する
これらを軌道制御と言います。
軌道制御には大きく分けて「面内制御」「軌道面制御」の2つがあります。
面内制御
何かの天体、例えば地球を回る軌道は、その地球の中心を含めて1枚の平面上にあります。その平面を軌道面と言います。
軌道上をぐるぐる回っているとき、進行方向(あるいは反対)に加速すると、軌道面内で軌道の大きさや形(円から楕円にしたりとか)を変えられます。これを面内制御と言います。
例:ISSの軌道を上げる
国際宇宙ステーションのリブースト(軌道上昇)も面内制御です。ISSが回っている高度はわずかな空気抵抗があり、少しずつ軌道が落ちていくので、時々進行方向に加速して高度を上げます。
例えば高度が300kmまで落ちたISSを高度400kmまで上げようとしたら、まず秒速0.02km(時速だと70kmほど)加速し、地球を挟んだ反対側で秒速0.03km加速すればOKです。実際には加速の制限などあってもっと手数を踏むことになります。
アポジとペリジ
地球を回る円軌道のどこかで進行方向に加速すると、地球の中心を挟んだ反対側で一番遠くなり、そこを過ぎると地球に近づいて最初加速したところに戻ってきます。このときの地球から一番遠いところを遠地点、一番近いところを近地点と言います[1]。
円軌道から一回り大きい円軌道になるには、どこかで一旦加速して楕円軌道になったあと、半周したところ(遠地点)でもう一度加速してやります。ホーマン遷移と言って、効率がいいやり方です。
軌道面制御
軌道上をぐるぐる回っているとき、軌道面に対して垂直に加速すると、軌道面の角度を変えられます。これを軌道面制御(面外制御)と言います。
静止衛星は軌道が乱れると地上から見て東西南北にズレるようになり、各静止衛星の割り当てられている区域から出てしまうので修正が必要です。東西方向のずれを直すのは面内制御、南北方向のは軌道面制御になります。
軌道面制御は面内制御と比べて大きな力が必要です。
例:ISSの軌道面を変更する
ISSの軌道面を変更するとします。現在のISSは軌道傾斜角(地球を回る軌道の場合、赤道に対する角度)51.6度の円軌道になっています。これはロシアにとって都合がいい角度ですが、米国や日本に都合がいい28.5度[2]にするにはどうすればいいでしょう。
ISSの高度を400kmとすると周回速度は毎秒7.67km。これを(51.6引く28.5で)23.1度変えるので……。ISSが赤道上空に来たときに、垂直方向に毎秒3.07kmの速度をかければ、軌道面は28.5度になります。
この速度って、面内制御の要領で進行方向に加えると、7.67+3.07=10.74km/sになります。あと秒速0.01km足してやれば月の公転軌道に達します[3]し、秒速0.1kmちょい足してやれば(高度400kmの軌道から)地球の重力を脱出できる速度になります。直角三角形定規の小さい方の角度に満たない分の変更にも、地球から脱出するのに近いエネルギーが必要です。
静止衛星が軌道に乗るまで
静止軌道とは
- 赤道上空(緯度0度、軌道傾斜角0度)
- 円軌道(離心率0)
- 高度35786km(地球中心から42164km)
この軌道に地球の自転方向と同じ向きに人工衛星を投入すると、地球の自転周期と同じ時間で回ります。地上から見ると空の一点から動かず、静止して見えます。静止しているように見えるので静止衛星です。静止衛星ができる軌道を静止軌道と言います。
地球を回る軌道は高度や離心率や軌道傾斜角の違いなどで無数にあります。しかし静止衛星ができる軌道は、上記の3つの条件を満たす1つしかありません。
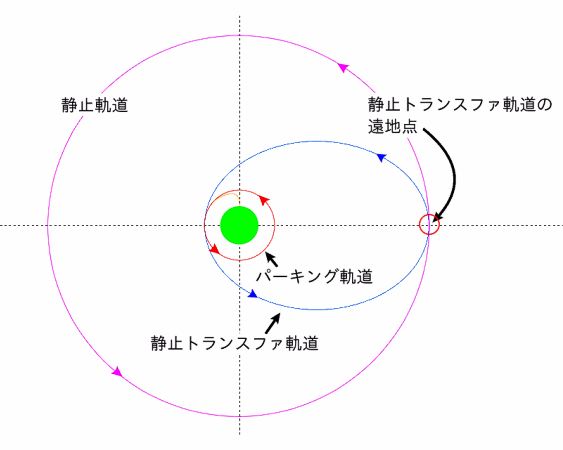
静止軌道に人工衛星を投入する手順(基本・面内制御)
- 打上げ用ロケットで人工衛星を高度数百kmの円軌道に一旦乗せる(パーキング軌道)。
- 赤道上空に来たら加速して楕円軌道に入る。遠地点が静止軌道の高度になるよう加速する(静止トランスファ軌道)。
- 遠地点で噴射し(アポジキック)、近地点を静止軌道まで持ち上げる。これでとりあえず高度約36000kmの円軌道になる(ドリフト軌道)。
- 調整を行い、静止軌道にのる。
もうちょい詳しく
目標の軌道に乗る前に一時的に使われる低軌道をパーキング軌道と言います。この高度が250kmだと、軌道での速度は秒速7.75kmになります。
秒速2.44kmの加速をかけると、遠地点高度が約36000kmの楕円軌道になります。静止軌道に入るための軌道なので、静止トランスファ軌道と言います。赤道上空で加速すれば遠地点も赤道上空になり、静止軌道に入りやすくなります。この加速は打上げ用ロケット(2段目など)が行いました。静止トランスファ軌道に入ったらロケットから人工衛星が切り離されます。
遠地点では速度が秒速1.60kmになりますが、静止軌道の高度は秒速3.07kmなので、遠地点にきたら秒速1.5kmほど加速すると高度約36000kmの円軌道に入ります。
まだ完全な静止軌道ではなく、高度が若干違ってたりします。少し高いと遅くなるので、衛星を地上から見ると東から西へ少し動くように見えます。逆に低いと西から東へ動くように見えます。少し楕円軌道になっていると、1日で東西に動いているように見えます。この軌道は衛星が漂流しているように見えるのでドリフト軌道と言います。これを利用して衛星をあらかじめ定められた経度上に正確に持って行きます。
最後は人工衛星が持つ小型のロケットを噴射して調整を行います。これで静止軌道に乗ります。
人工衛星側で最初の方の大きな仕事が、静止トランスファ軌道から円軌道に移る遠地点での噴射です。ここに使われる固体ロケットモーターをアポジモーターと言います。30秒ほどの噴射で円軌道に移ります。
赤道近くから打ち上げたならこれでOKです。
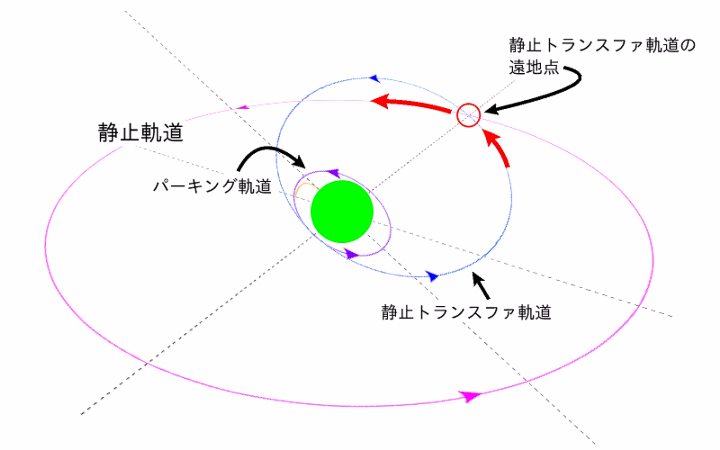
赤道から離れた射場からの追加手順(軌道面制御追加)
日本や米国のように北緯30度くらいから、地球の自転を最大限利用するために真東に打ち上げると、赤道に対して30度くらい傾く軌道に入るので(理由は後述:東か南東か)、どこかで角度を0度にしないといけません。そのぶん余計に力を使う必要があり、静止トランスファ軌道の遠地点で噴射する際、角度変更用に秒速0.3kmほどの追加が必要になります(合計で秒速1.8kmほどの加速)。
近地点ではどうか
近地点で角度を変えるのはどうかと言いますと、地球から近いところでは速度が大きいので、角度変更に大きな力が必要です。
高度250kmのパーキング軌道から静止トランスファ軌道+30度変更するには、静止トランスファ軌道にする面内制御分とあわせて秒速5.21kmほど使います。角度を変えない時の倍の速度がいります。
少し上の「例:ISSの軌道面を変更する」と同じく、この増加分の速度を全部進行方向に加えると、7.75+5.21=12.96km/sになります。高度250kmでの地球脱出速度は秒速10.97kmなので、楽勝で地球を脱出できます。飛んでいく方向次第では(地球の公転速度を生かせれば)太陽系から脱出できそうです。
遠地点では角度を変えなくてすむので人工衛星側は楽になりますが、打ち上げロケット側は大変です。同じ仕事をするなら人工衛星を切り離さずに遠地点まで付いていき、そこで軌道を変更する方が、同じ角度を変えるにも力が少なくてすみます。
と言うことで、静止軌道に人工衛星を投入する場合、遠地点で仕事をするのは大きな意味があります。
- 静止トランスファ軌道から静止軌道に近い円軌道に移る
- 赤道から離れたところから打ち上げた場合、軌道面を変える
これらを行うのに適した箇所が遠地点です。
静止軌道に人工衛星を投入する手順(最近)
アポジモーターは固体ロケットの長所と短所を持っています。それらと逆の特徴を持つ液体ロケットを使ったアポジエンジンは、1980年代から使われるようになっています。電気ロケットは静止軌道に入った後の軌道制御などですでに使われていますが、静止トランスファ軌道からの軌道変更用としても考えられています。
軌道も、軌道面の変更を高度36000kmより遠いところにして、より小さな力で角度を変更できるようにするなど、いろいろな軌道が使われています。
米国やロシアは、打上げ用ロケットが静止軌道まで人工衛星を持って行く「静止軌道直接投入」もやっています。
アポジエンジンや電気ロケットについて
液体ロケットを使ったアポジエンジンの使用は、世界初の静止衛星となった(不完全でしたが)米国のシンコム2の頃から検討されていたようですが、シンプルさやコストなど固体ロケットの長所が選ばれたようです[4]。
液体ロケットのアポジエンジンは固体ロケットより比推力が高く(燃費がいい)、燃焼の停止や再点火が可能です。そのため固体ロケットのアポジモーターより軌道に投入する際の精度が高くなるなどの利点があります。初めて使われたのはフランスと西ドイツが開発した静止通信衛星シンフォニーAで、1974年12月19日に米国のソー・デルタ2914ロケットで打ち上げられています。その後は1980年代から使われるようになりました。日本では1994年の技術試験衛星VI型「きく6号」がアポジエンジンを積んでいましたが、不具合発生で静止軌道には乗れませんでした。
化学ロケットより比推力が高い電気ロケット(イオンエンジンやホールスラスタなど)の使用も考えられています。推力が小さいので、アポジモーターなら数十秒で済んだところが数ヶ月かかりますが、推進剤の質量が化学ロケットの2~3割ですむので、そのぶんを静止衛星の姿勢・軌道制御用推進剤にしたり(衛星の寿命が延びる)、機材を多く詰める利点があります。
アポジモーター
遠地点(アポジ)で使う軌道制御用の固体ロケット。英語だと Apogee kick motorで、AKMと略されたりします。
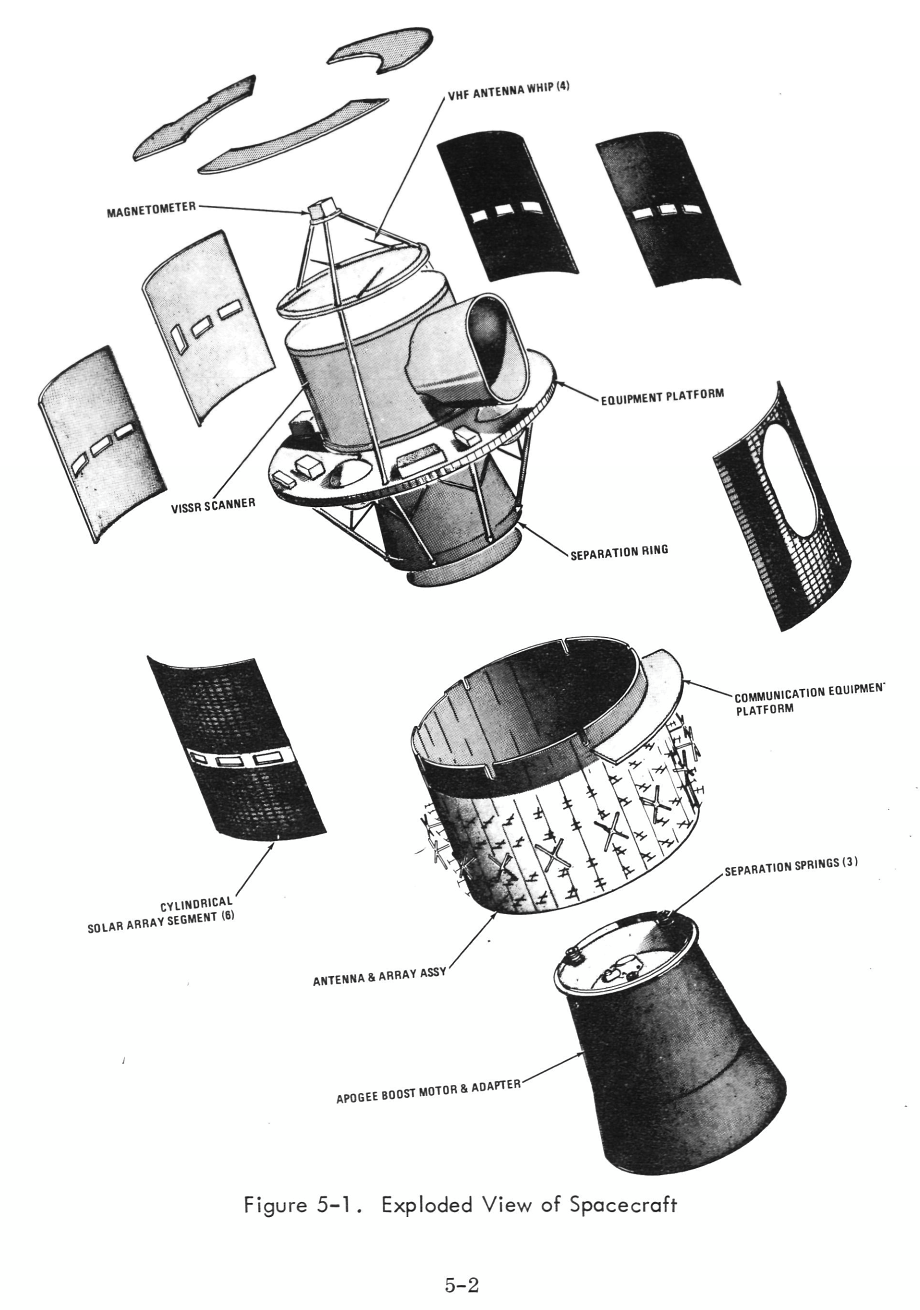
静止衛星の例(GMS-5「ひまわり5号」)

ひまわり5号は、1995年3月に打ち上げられた静止気象衛星です。可視光と赤外線の両方を同時に撮影できるVISSRで観測します。
アポジモーターは本体の中央下にあります。ひまわりは1~5号機まで米国サイコオール社のSTAR-27を使っています。
画像左中にある「RADIATION COOLER」はVISSRの赤外線検知器を冷却するものです。これを稼働させるため、アポジモーターは使用後に切り離されます。
アポジブーストモーター(米国SMS、きく2号)
「SMS-1」「SMS-2」は米国の静止気象衛星で、1974年と75年に打ち上げられました。1971年12月1日発行の説明書には、アポジブーストモーター(ABM)と書かれています。
日本初の静止衛星「きく2号」は1977年に打ち上げられた技術試験衛星ですが、1978年の日本航空宇宙学会誌記事「静止衛星きく2号」[5]にも「アポジブーストモータ」の記述があります。
昔はこういう呼び名のもあったようですよ、と言うことで。
非・静止衛星の例(みちびき初号機後継機・アポジエンジン)

準天頂衛星システム「みちびき」の初号機後継機です。準天頂軌道を回っています。静止軌道と同じく周期は地球の自転時間と同じですが、軌道面は赤道から40度ほど傾いているほか、軌道の形も円ではなく少し楕円になっています。
2010年9月11日に打ち上げられたみちびき初号機は、12日から17日にかけてアポジエンジンを5回噴射し、準天頂軌道に近いドリフト軌道に乗りました。その後21日からRCSスラスタを使って軌道の調整を行い、27日に準天頂軌道に乗っています。
準天頂軌道について
準天頂軌道について詳しくはJAXAの準天頂軌道とはを読んでください。
割と勘違いしやすいのは「人工衛星が8の字に回っている」と思い込んでしまうことです。その辺は内閣府のみちびきサイトで準天頂軌道 衛星模型の動画を見てください。動画の装置は円軌道なので対称8の字になっていますが、軌道を楕円にして遠地点を日本上空にし、日本上空で長めにいる(ケプラーの第2法則)ようにしたのが準天頂軌道です。
外観と構造

アポジモーターに使われている STAR-27 固体ロケットの外観です。ノースロップ・グラマン社のカタログより引用しています。
左がチタン製のモーターケースで右がノズル。直径69.3cm、長さ124cm。プロパンガスの小型ボンベにノズルを付けたような感じです。家庭用プロパンのは大きくても直径は40cmないみたいですが。
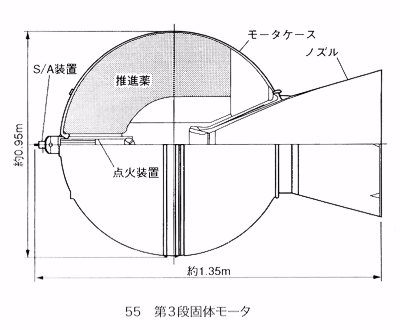
STAR-27 ではなく STAR-37N という固体ロケットの断面図です。日本のN-Iロケット(1975年~1982年)の3段目に使われた固体ロケットです。球形のモーターケースの中に推進薬が詰められています。
点火装置が前方に付いています。スペースシャトルの固体ロケットブースターも前部に付いていました。ほかにもノズルのスロート(一番細くくびれているところ)の周りに付いているものもあります。
| 種類 | 平均推力(ニュートン) | 平均推力(キログラム重) |
|---|---|---|
| STAR-27 | 25400N | 2600kgf |
| きく5号用[6] | 27000N | 2750kgf |
| R-4D-11[7](アポジエンジン用) | 490N | 50kgf |
液体ロケットのアポジエンジンの推力が小さいですが、大推力で軌道を変更する固体ロケットモーターと比べて衛星への負担が少ないなどの利点があります。推力が小さい分、数回に分けて確認しながら軌道を変更するので、精度も高められます。
アポジモーターのまとめ
軌道を変更するために遠地点で使う固体ロケットをアポジ(キック)モーターと言います。
姿勢制御ではなく軌道制御用です。
地球周回軌道上の遠地点で使われます。一回の使用で軌道の形や軌道傾斜角を変更します。
固体ロケットなので一度点火したら止まりません。再点火もできません。
ガンダム世界では定着しなかったようですが、(主にガンプラの話で)使っている方は結構多いように思います。最初に「アポジモーター」で覚えてしまったので今更どうしようもなくなってしまったという感じでしょうか。
その他
東か南東か
「赤道から離れた射場からの追加手順」の図で、打ち上げ(オレンジ色:見づらいですが)+パーキング軌道+静止トランスファ軌道を、静止軌道に対して斜めに描いています。これは、日本や米国のフロリダなど北緯30度くらいから東に打ち上げると赤道に対して30度くらい傾いた軌道に乗りますよ、ということを示しています。
東に打ち上げているのに斜めはおかしい、それだと南東に打ち上げていないか? と、思われるかもしれません。
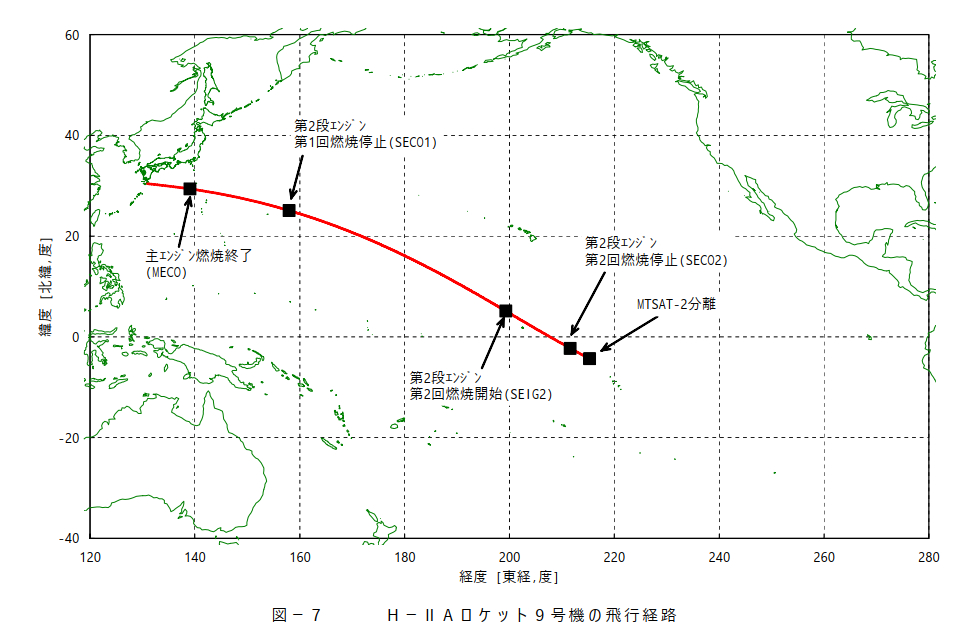
上図は静止衛星であるひまわり7号打ち上げのものです。なだらかにカーブしながら南東に向かっているように見えます。でもこれは南東なんでしょうか。
地理のクイズで、日本から東に進むとどこに着くでしょうという問題の答えがアメリカじゃなくてチリというのを聞いたことがあるかもしれません。

地図の中心からの方位が正しく描写される図法の地図です。ロケットの射場がある内之浦や種子島から東に打ち上げると、経線や緯線を斜めに突っ切って南米のチリに着きます。さらに進むとアフリカ南部やインド、中国を通過してまた元の上空に戻ります。実際に人工衛星を飛ばすと、一周する間に地球が西から東へ自転するので、打ち上げ場所の上空には戻らず、西にズレていきます。
Google Earthをインストールしているなら確認できます。起動すると日本が中心に来ると思いますが、マウスなどを使わず右カーソルキー→で地球儀を回転してみましょう。経緯度線があると混乱しやすいので、最初はメニューバーの[表示]→[グリッド]のチェックを外した方がいいかもしれません。
常に東に進む(南北の子午線と常に直交するように進む)だと日本から進めばアメリカに着きます。そうではなく、出発地点の東に進む(「東」を気にするのは出発地点だけ)だとチリにつき、その後日本の対蹠地(地球の中心を通って反対側)を通過して日本に戻ってきます。ロケットの打ち上げで地球の自転を最大限利用するのには、出発地点の東が重要なのでした。
今時は小学校高学年で習うみたいですね(5年社会のお話パート3「日本の東はアメリカ?」 – 南砺市立城端小学校)。私はすっかり忘れてましたが。
しかし飛行経路を見て気づいたのですが、ハワイの緯度って台湾とそんなに変わりなかったのねと言うか、フィリピンのほとんどより北だったとは。「ハワイは赤道近く」と思い込んでおりました。思い込みは怖いです。
文書更新履歴
- 2022年12月05日
- 「東か南東か」の説明を少し改良。
- 2022年11月19日
- 「東か南東か」の説明に少し追記。
- 2022年11月16日
- このページを初公開。